TRW Proposal Project
The TRW Proposal Project was a great learning experience for me not only in efficiency, but also in workmanship. At the beginning of the project, we picked our roles within our teams. Each role had different assignments they would be working on over the course of the project. At the beginning of the project, we were given a Student Pacing Guide, which served as a calendar that included when different assignments were due and gave me some outlook on what assignments I would have in the future. Initially, I did not really use the Student Pacing Guide, but as I progressed through the project, I realized how useful it is to have a calendar to help you pace your work. Another aspect of this project that helped me improve my workmanship was the peer review. Throughout the project, different writers from different groups would share assignments to give feedback on them. This was helpful because it helped me ensure that my work made sense and that it was meeting the requirements. We also could get teacher feedback throughout the project, I which I took to make sure that the assignment was good. Overall, this project taught me some lessons on how to be more efficient, and how to improve my workmanship.
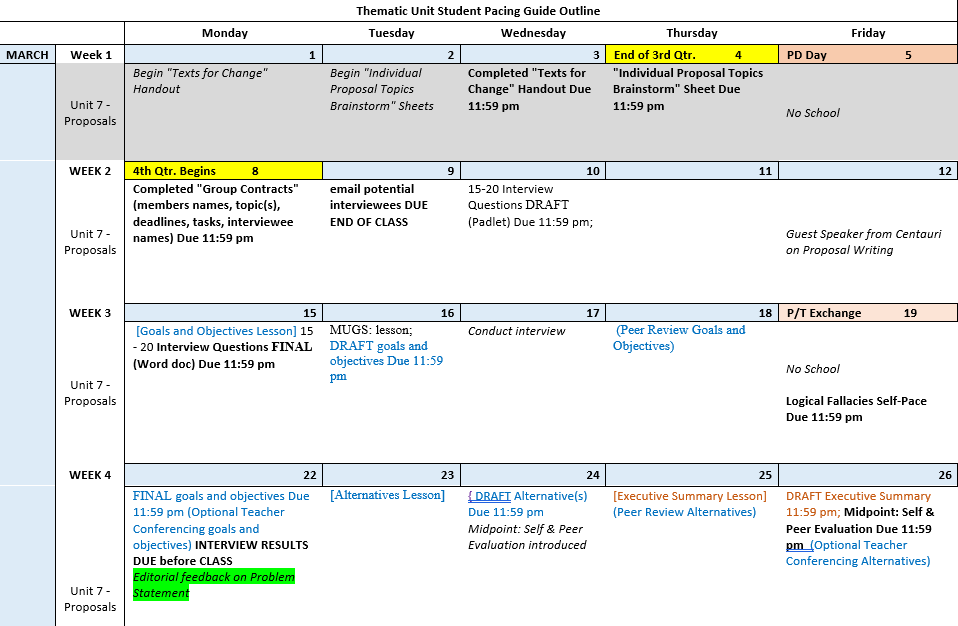
My student pacing guide from the TRW Proposal Project (DRSS)